Сороконожки известны своей вихляющей походкой. Имея от десятков до сотен ног, они могут преодолевать любую местность без остановки.
«Когда вы видите бегущую сороконожку, вы, по сути, видите животное, обитающее в мире, который сильно отличается от нашего мира движения», — говорит Дэниел Голдман, профессор семьи Данн в Школе физики. «В нашем движении в основном преобладает инерция. Если я машу ногой, я приземляюсь на ногу и двигаюсь вперед. Но в мире многоножек, если они перестают шевелить своими частями тела и конечностями, они, по сути, мгновенно перестают двигаться».
Заинтересовавшись, может ли множество конечностей быть полезным для локомоции в этом мире, команда физиков, инженеров и математиков из Технологического института Джорджии использует этот стиль движения в своих интересах. Они разработали новую теорию многоногой локомоции и создали многоногие модели роботов, обнаружив, что робот с лишними ногами может передвигаться по неровным поверхностям без дополнительных сенсорных или управляющих технологий, как и предсказывала теория.
Эти роботы могут передвигаться по сложной, ухабистой местности — и есть потенциал для их использования в сельском хозяйстве, освоении космоса и даже в поисково-спасательных операциях.
Исследователи представили свою работу в статье «Многоногий транспорт материи: Рамка для передвижения по шумным ландшафтам» в журнале Science в мае и «Самодвижение посредством скольжения: Фрикционное плавание в многоногих локомотивах» в Proceedings of the National Academy of Sciences в марте.
Нога вперед
Для написания статьи в журнале Science исследователи воспользовались теорией связи математика Клода Шеннона, которая показывает, как надежно передавать сигналы на расстояние, чтобы понять, почему многоногий робот так успешно передвигается. Теория связи предполагает, что один из способов обеспечить доставку сообщения из точки А в точку Б по шумной линии — это не посылать его в виде аналогового сигнала, а разбить его на дискретные цифровые единицы и повторить эти единицы с соответствующим кодом.
«Нас вдохновила эта теория, и мы попытались понять, может ли избыточность быть полезной при транспортировке материи», — говорит Бакси Чонг, постдокторский исследователь в области физики. «Итак, мы начали этот проект, чтобы посмотреть, что произойдет, если у робота будет больше ног: четыре, шесть, восемь и даже 16».
Команда под руководством Чонга, включая постдокторанта Школы математики Дэниела Ирвина и профессора Грега Блекермана, разработала теорию, согласно которой добавление пар ног к роботу увеличивает его способность устойчиво перемещаться по сложным поверхностям — эту концепцию они называют пространственной избыточностью.
Благодаря этой избыточности ноги робота успешно передвигаются сами по себе, не нуждаясь в датчиках для интерпретации окружающей среды. Если одна нога отказывает, обилие ног позволяет ему двигаться независимо от этого. По сути, робот становится надежной системой для транспортировки себя и даже груза из пункта А в пункт Б на сложных или «шумных» ландшафтах. Эта концепция сравнима с тем, как можно гарантировать пунктуальность в колесном транспорте, если путь или рельсы достаточно гладкие, но без необходимости инженерного проектирования окружающей среды для создания этой пунктуальности.
«Для управления продвинутым двуногим роботом в режиме реального времени обычно требуется множество датчиков», — сказал Чонг. «Но в таких приложениях, как поиск и спасение, исследование Марса или даже микророботы, есть необходимость управлять роботом с ограниченным количеством датчиков». Есть много причин для такой инициативы без датчиков. Датчики могут быть дорогими и хрупкими, или окружающая среда может меняться настолько быстро, что не позволяет обеспечить достаточное время реакции датчика и контроллера».
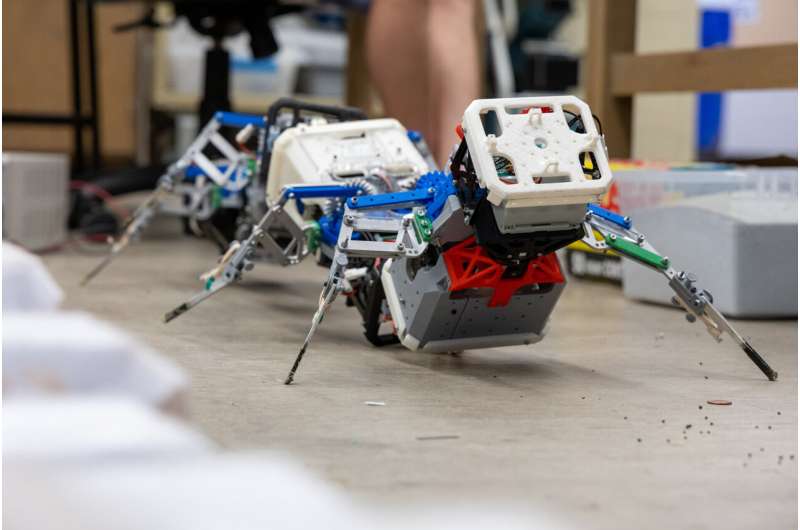
Чтобы проверить это, Джунтао Хэ, аспирант кафедры робототехники, провел серию экспериментов, в которых он и Даниэль Сото, студент магистратуры Школы машиностроения имени Джорджа Вудруфа, построили местности, имитирующие непостоянную природную среду.
Затем он протестировал робота, каждый раз увеличивая количество ног на две штуки, начиная с шести и заканчивая 16. По мере увеличения количества ног робот мог более проворно перемещаться по местности, даже без датчиков, как и предсказывала теория. В конце концов, робот был испытан на открытом воздухе на реальной местности, где он смог передвигаться в различных условиях.
«Это действительно впечатляет — наблюдать, как многоногий робот умело ориентируется как в лабораторных условиях, так и на открытом воздухе», — сказал Джунтао. «В то время как двуногие и четвероногие роботы в значительной степени полагаются на датчики для преодоления сложного рельефа, наш многоногий робот использует дублирование ног и может выполнять подобные задачи с помощью управления в открытом контуре».